I'm excited to build products that can positively impact the lives of people. I co-founded Abridge to help everyone stay on top of their health. I started KONAM Foundation to solve challenges in agriculture and education using tech/code.
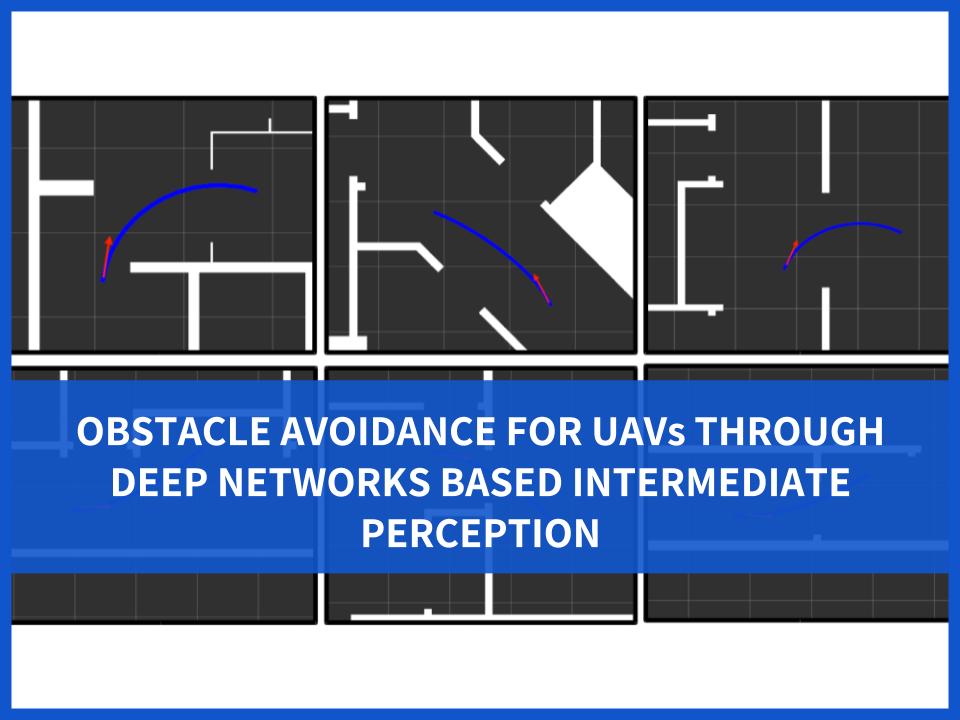
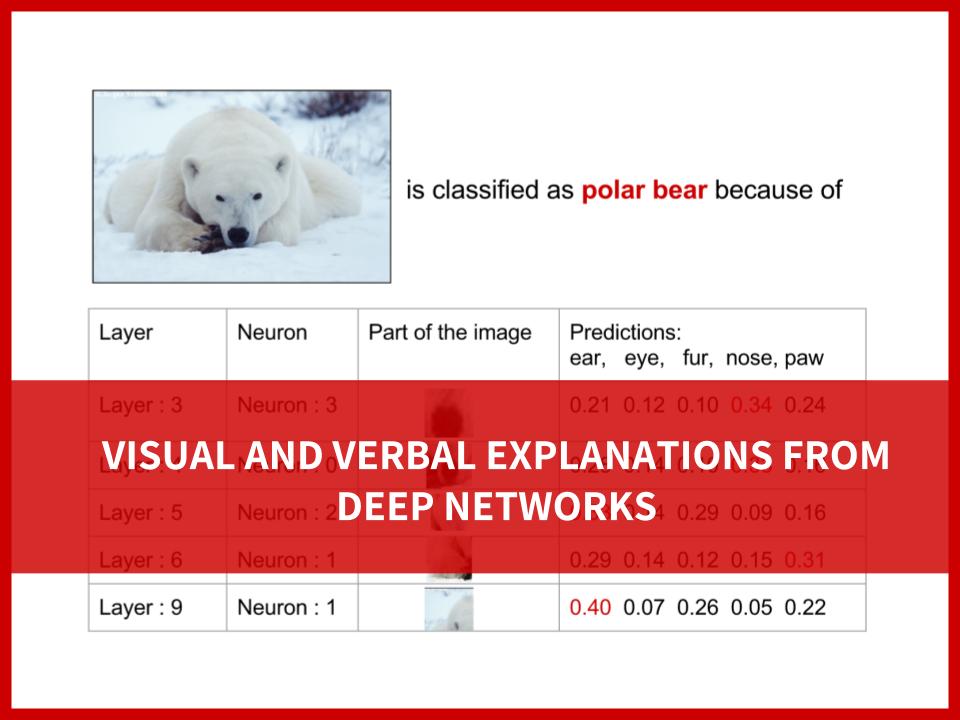
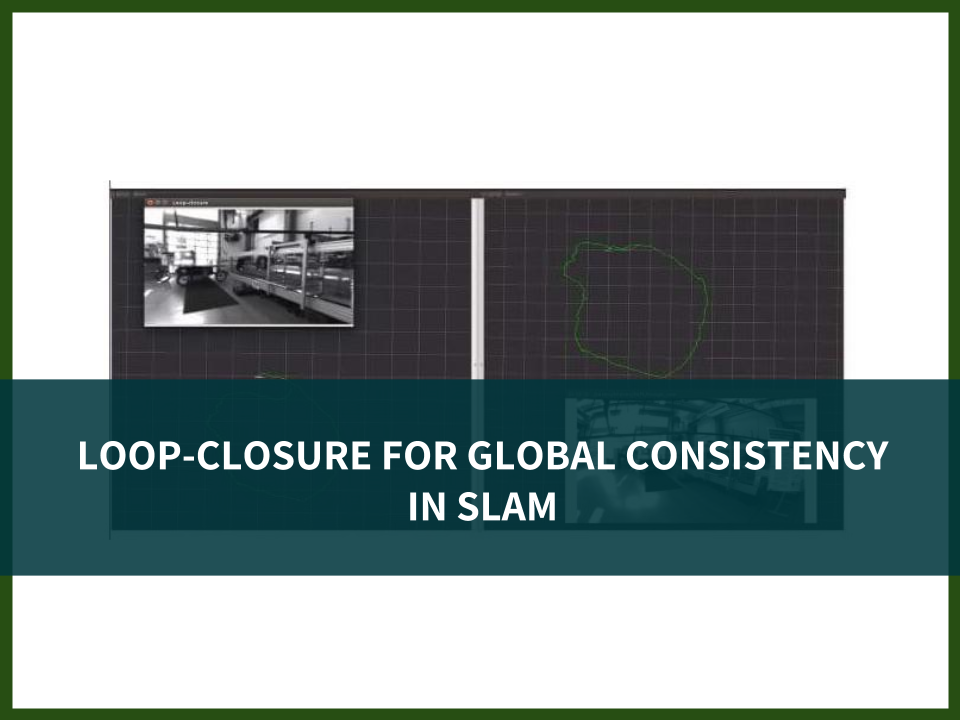
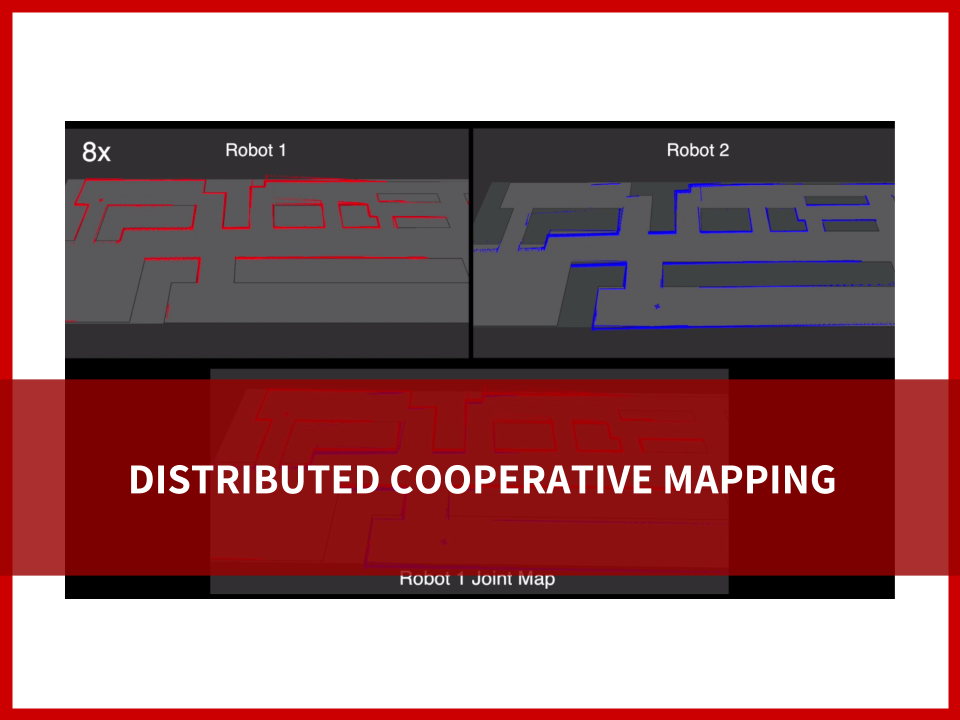
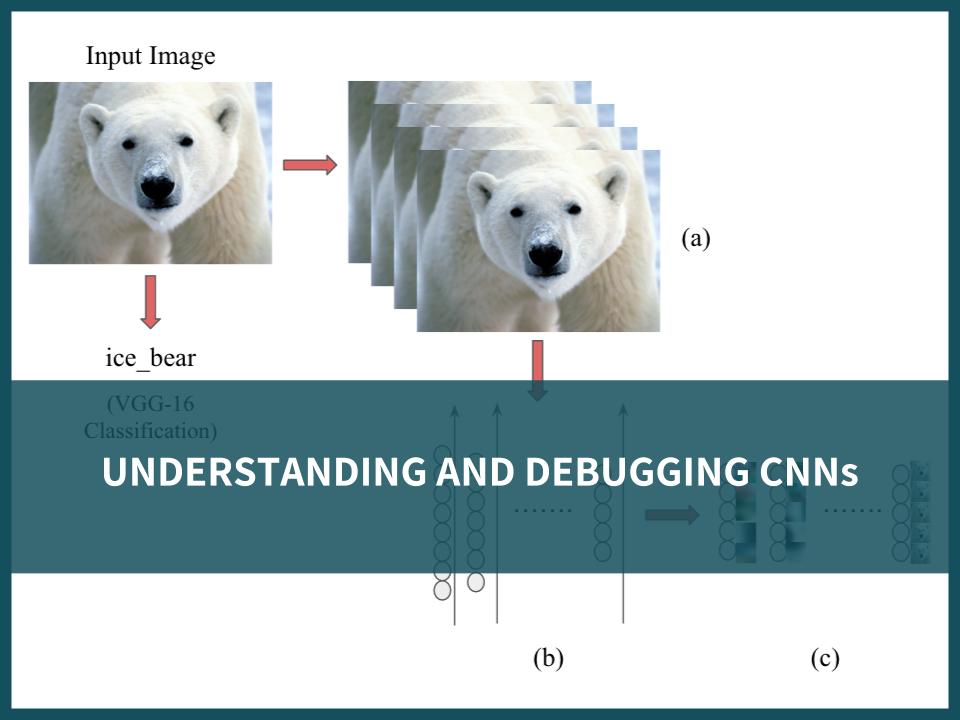
I'm currently working at the intersection of ML+Health. In the past, I worked on enhancing perception capabilities of UAVs, on multi-robot coordination, and was involved with several health-tech projects. As part of my Master's thesis, I worked on deep-learning-based autonomy for UAVs and developed techniques to make deep-learning algorithms interpretable.
Talks
[Twilio] Improving Patient Outcomes with Machine Learning Powered Medical Transcription
[PGH.AI] What the Use of AI in Healthcare Means for You
[CMU Computer Science] Medical Dialogue Virtual Roundtable
[Voice First Health] Putting Patients First
Writings
[Fierce Healthcare] For AI to truly transform healthcare, we have to focus on patients
[Quartz] Where did IBM go wrong with Watson Health?
[Fast Company] When will AI be ready to really understand a conversation?
[Abridge] How machine learning supports understanding and follow-through in healthcare
[Abridge] Our approach to machine learning: Art + Science
[Python] Abridging clinical conversations using Python
News
[CMU] Robotics Institute Alumnus Named to Forbes 30 Under 30
[Forbes] This AI Startup Raised $15 Million To Help Patients Transcribe Doctor Appointments
[Crunchbase News] Abridge Debuts With $15M Round To Provide Medical Plans Of Action
[Pittsburgh Post-Gazette] UPMC-backed startup launches app to keep track of doctor's recommendations
[MedCity News] UPMC rolls out smart after-visit summaries for telehealth
[NEXTpittsburgh] Can’t remember everything from that telemed call? Abridge has a free app for that
[Pittsburgh Business Times] Forget your doctor's orders? This startup makes it easier to keep track
[Telangana Today] Konam Foundation adopts new projects in Telangana
[The Hans India] New app for indigenous farmers
[The Hindu] AP lad develops android application
Publications
[Clinical NLP, EMNLP] Weakly Supervised Medication Regimen Extraction from Medical Conversations
[MLHC] Towards an Automated SOAP Note: Classifying Utterances from Medical Conversations
[ICASSP] ASR Error Correction and Domain Adaptation Using Machine Translation
[Thesis, CMU] Vision-Based Navigation and Deep-Learning Explanation for Autonomy
Checkout my Google Scholar for more